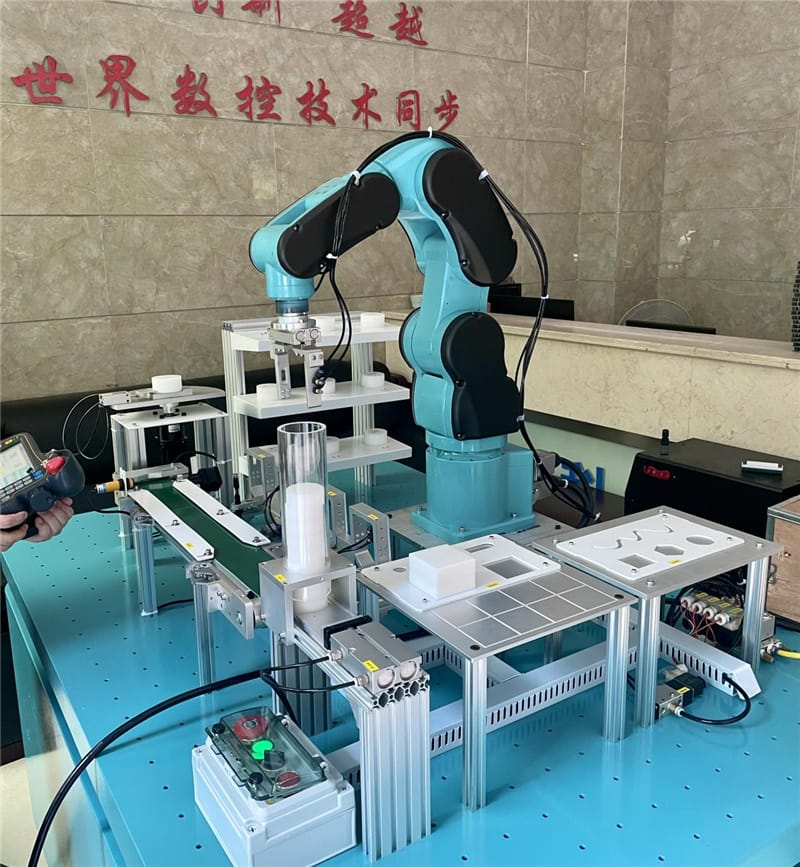




6-Axis Education tabi Articulated Robot Arm Diy Delta tabi kamẹra Robot Arm
Sipesifikesonu
Egbe:6
Isanwo ti o pọju: 4kg
Tun ipo: ± 0.01mm
ọriniinitutu lilo: 20-80%
agbegbe ologbon: 0℃-45 ℃
Fifi sori: ilẹ
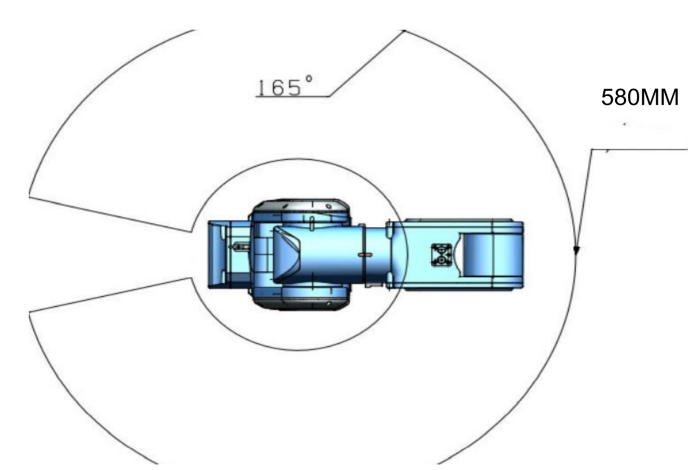
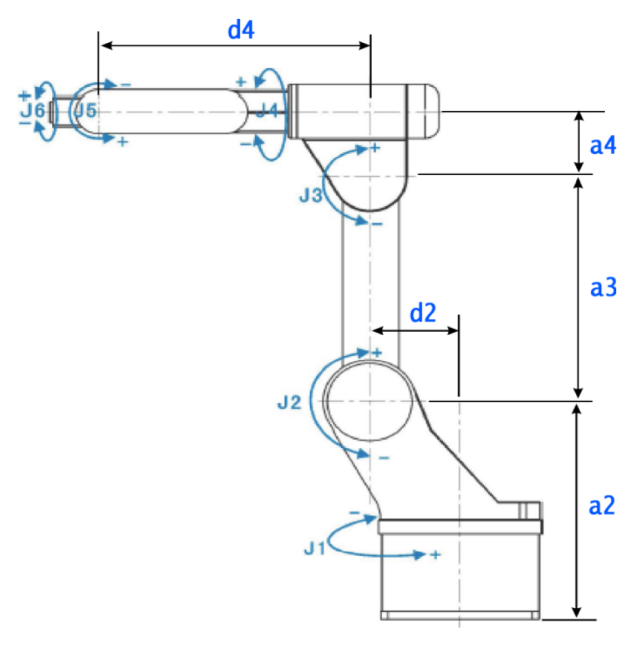
Ibi iṣẹ: J1:±165°
J2:-100°~+120°
J3:+150° ~-60°
J4:±175°
J5:+130° ~-30°
J6:±180°
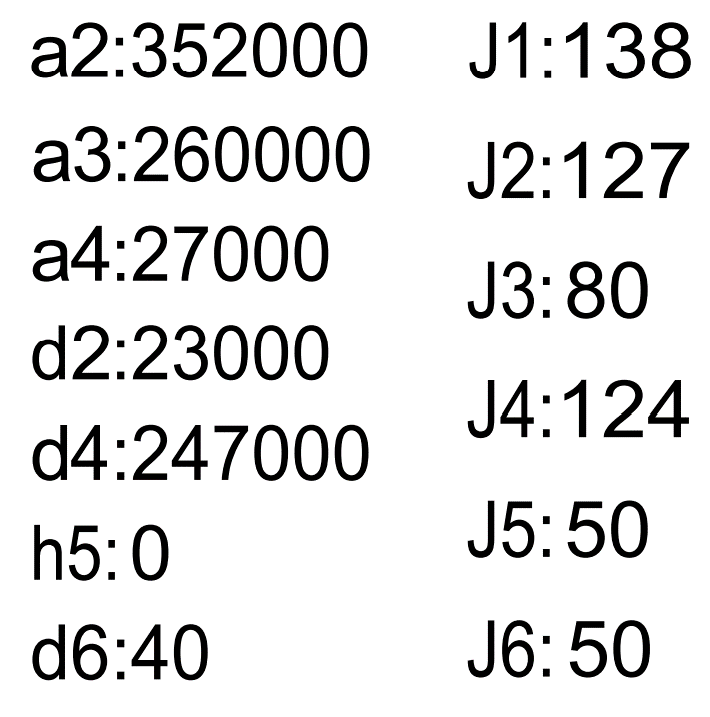
Iyara ti o pọju: J1:260°/s
J2:250°/s
J3:250°/s
J4:250°/s
J5:200°/s
J6:760°/s
ibiti o ṣiṣẹ:
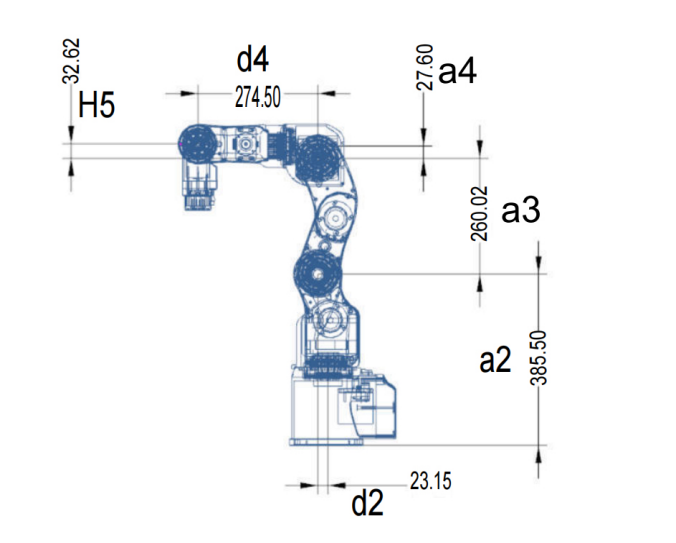
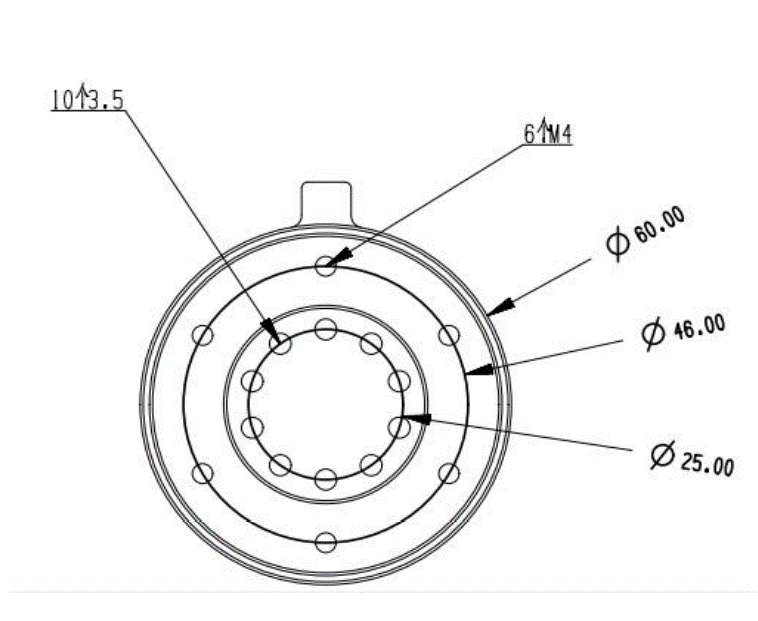
ipilẹ fifi sori:
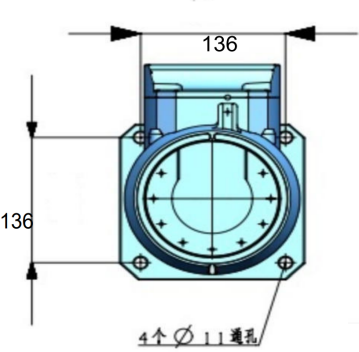
ipilẹ fifi sori:
Awọn ohun elo
Awọn ohun elo ẹkọ:
1. Lati iwadi awọn ipilẹ tiwqn ti awọn robot eto.
2. Lati iwadi awọn siseto ati ẹkọ awọn iṣẹ ti awọn robot kọ pendanti.
3. Lati iwadi awọn ipilẹ imo ti robot offline siseto.
4. Lati ṣe iwadi iṣẹ ati siseto ohun elo ti robot io.
5. Lati ṣe iwadi awọn ohun elo wiwo robot
Awọn iwoye ti iṣowo: Robot yinyin ipara Robot Bartender Robot kofi Robot wara tii Awọn iṣẹlẹ ile-iṣẹ ina: Idiwọn Ṣiṣayẹwo Ṣiṣayẹwo Pipin
Ọja Awọn ẹya ara ẹrọ
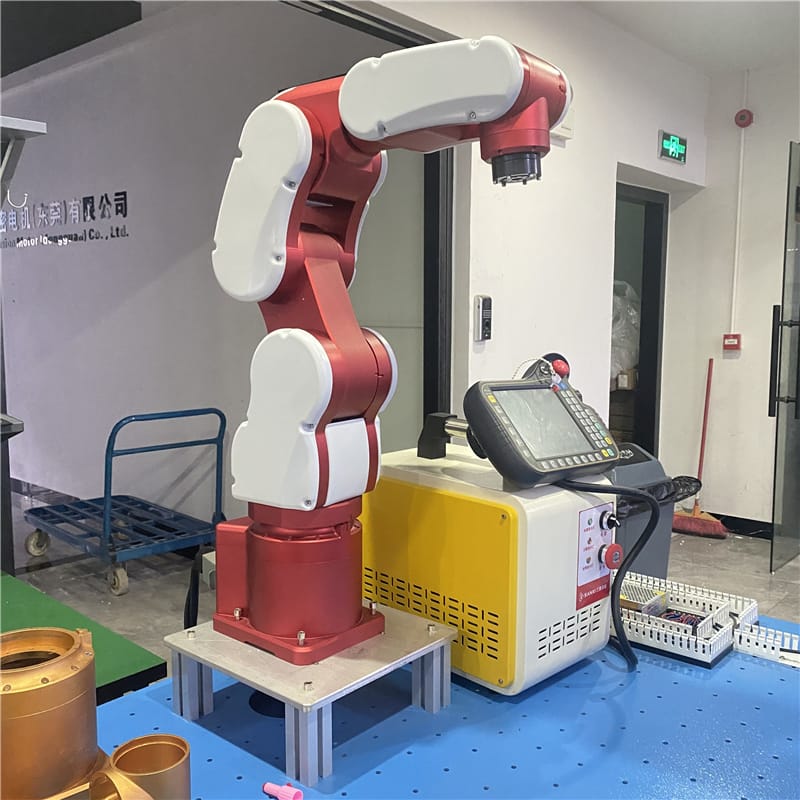
Arm Robotic: Apa roboti jẹ ti awọn simẹnti aluminiomu nipasẹ ile-iṣẹ ẹrọ CNC, ati pe o ti fọ dada pẹlu ṣiṣu ati pe o ni irisi ẹlẹwa.
Ipamọ Cable Hole: Apa robot ti ni ipamọ awọn ihò USB, eyiti o lẹwa ati pe ko ṣe idiwọ iṣẹ ti olufọwọyi naa. Ipari ti trachea ti wa ni ipamọ fun ibudo ati asopọ okun data.
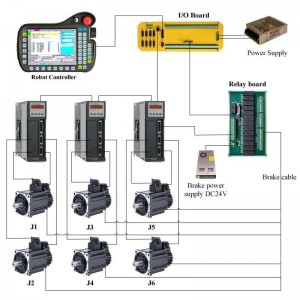
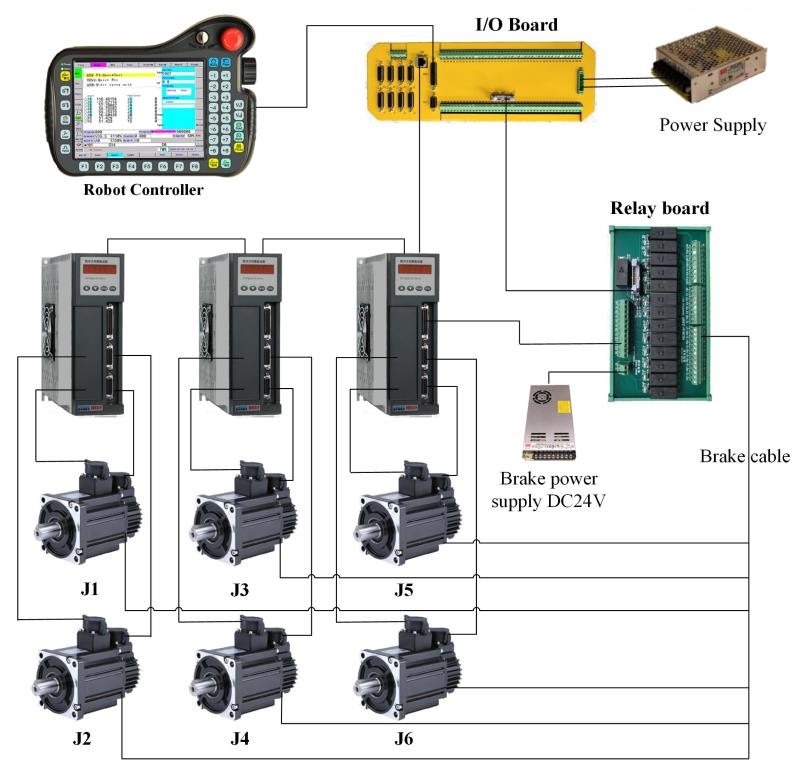
Igbimọ Alakoso: Ifihan LCD iboju-nla, ọna ifihan ede le da lori awọn iwulo alabara, iṣẹ ti o rọrun ati mimọ ati siseto, pẹlu iyipada paramita ori ayelujara ati awọn iṣẹ idanimọ ara ẹni aṣiṣe.
Igbimọ Iṣakoso Robot: Eto iṣakoso išipopada oye gba imọ-ẹrọ kọnputa ti ile-iṣẹ, ati gbogbo oni-nọmba servo module pese agbara awakọ fun awọn ẹrọ AC servo ti apapọ kọọkan ti roboti.
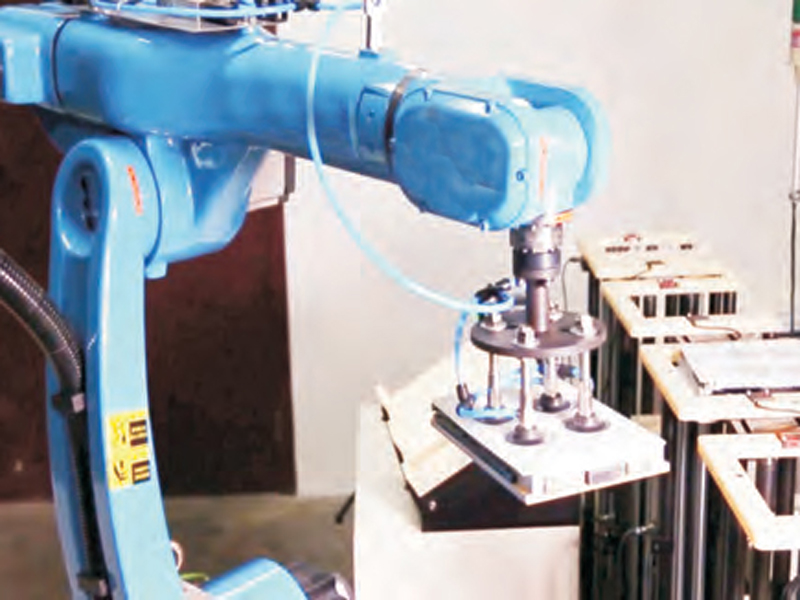
Awọn imuduro Robotic: Ohun elo ohun elo le yan oriṣiriṣi walẹ ati opoiye ni ibamu si awọn ibeere ti a ṣe adani, ati pe o ti fi sii lori flange ipari, eyiti o rọrun lati ṣatunṣe ati pe o ni iwọn lilo pupọ.